

测力杠杆校准拉力试验机测量误差分析
依据JJG475一2008《电子万能试验机检定规程》,采用测力杠杆为标准器具,对科盛仪器电子拉力试验机进行力值校准。
2、测量模型
ΔF=F2-F1 (1)
式中:ΔF一拉力试验机示值误差;F1一拉力试验机示值;F2一测力杠杆产生的力值。
3、误差来源过程分析
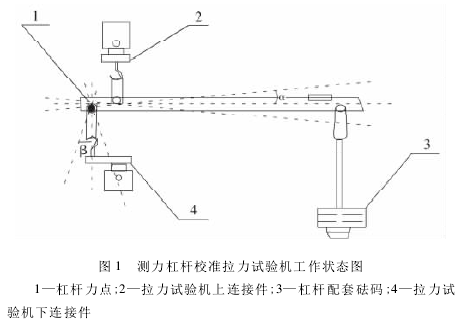
测力杠杆校准拉力试验机实际状态如图1所示,依据对标准测力杠杆的特性进行系统理论分析,杠杆力点端和拉力试验机的下连接件联接后的受力轴线垂直度、杠杆尺身水平度和杠杆配套砝码的质量误差是测力杠杆在校准拉力试验机过程中的标准器具引入的附加不确定度分量,具体如下:
(1)杠杆水平度引入的相对不确定度u1;
(2)杠杆力点端受力轴线垂直度引入的相对不确定度u2;
(3)杠杆配套砝码示值误差引入的相对不确定度u3;
(4)测量重复性引入的相对不确定度u4;
(5)被校拉力试验机分辨力引入的不确定度u5.
4、不确定度分量计算
4.1杠杆水平度引入的相对不确定度u1
理论计算和实际试验表明,若杠杆水平度控制在0.05%以内,则由水平角度引入的误差为±0.03%,以均匀分布估计:

4.2杠杆力点端受力轴线垂直度引入的相对不确定度u2
理论计算和实际试验表明,当杠杆呈水平状态时,如果杠杆下连接器偏心距离与杠杆短臂长度的一致性误差控制在12%以内,杠杆支点端倾斜角度控制在±0.5°以内,则由垂直角度引入的误差为±0.05%,以均匀分布估计:

4.3杠杆配套砝码示值误差引入的相对不确定度u3
依据JJG808一2014《标准测力杠杆检定规程》的要求杠杆配套力值砝码质量的允许误差为±0.02%,以均匀分布估计:

4.4测量重复性引入的相对不确定度u4
以恒宇仪器电子拉力试验机为例,在重复性条件下,用测力杠杆分别对其500N,1000N和2000N示值点连续重复测量10次,相应测量结果如表1所示:
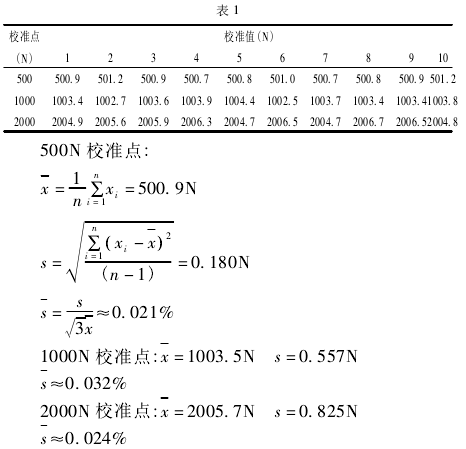
在实际拉力机校准过程中测量次数为三次,因此取三个校准点中重复性不确定度大值为重复性分量(1000N处):u4=0.032%
4.5被校拉力试验机分辨力引入的不确定度u5
依据JJG75-2008《电子式万能试验机检定规程》的试验机分辨力判定规则要求,被校拉力机在开机状态下示值得波动范围为4个字,则分辨力为0.3N,以均匀分布估计:

5、相对合成扩展不确定度评定
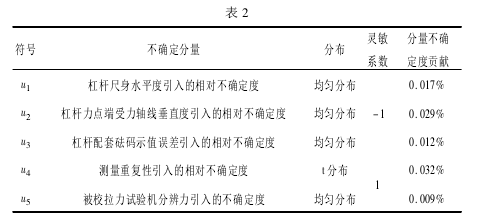
测量结果的不确定度分量汇总(见表2)
6、结束语
通过对测力杠杆校准拉力试验机的测量过程分析可以看出,使用0.1级标准测力杠杆可以满足0.5级电子式拉力试验机的检定或校准。在校准的过程中只要对杠杆的水平度和杠杆力点端受力轴线垂直度进行有效的控制,完全可以保证校准结果的准确可靠。


